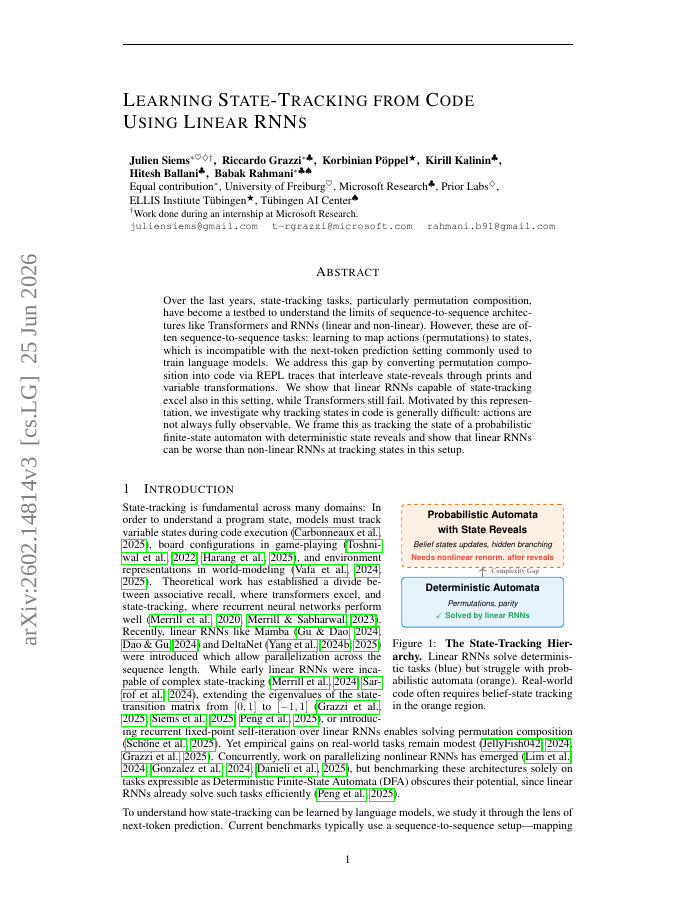
Over the last years, state-tracking tasks, particularly permutation composition, have become a testbed to understand the limits of sequence models architectures like Transformers and RNNs (linear and non-linear). However, these are often sequence-to-sequence tasks: learning to map actions (permutations) to states, which is incompatible with the next-token prediction setting commonly used to train language models. We address this gap by converting permutation composition into code via REPL traces that interleave state-reveals through prints and variable transformations. We show that linear RNNs capable of state-tracking excel also in this setting, while Transformers still fail. Motivated by this representation, we investigate why tracking states in code is generally difficult: actions are not always fully observable. We frame this as tracking the state of a probabilistic finite-state automaton with deterministic state reveals and show that linear RNNs can be worse than non-linear RNNs at tracking states in this setup.
Learning State-Tracking from Code Using Linear RNNs
Over the last years, state-tracking tasks, particularly permutation composition, have become a testbed to understand the limits of sequence models architectures like Transformers and RNNs (linear and non-linear).
- Preview
- Year
- 2026
- Hosting
- Full text hostedCC-BY-4.0
Cite
Notes
Only stored in your browser.
Attribution
- Abstract & full text
- arxiv.org/abs/2602.14814CC-BY-4.0
- TL;DR
- Semantic Scholar