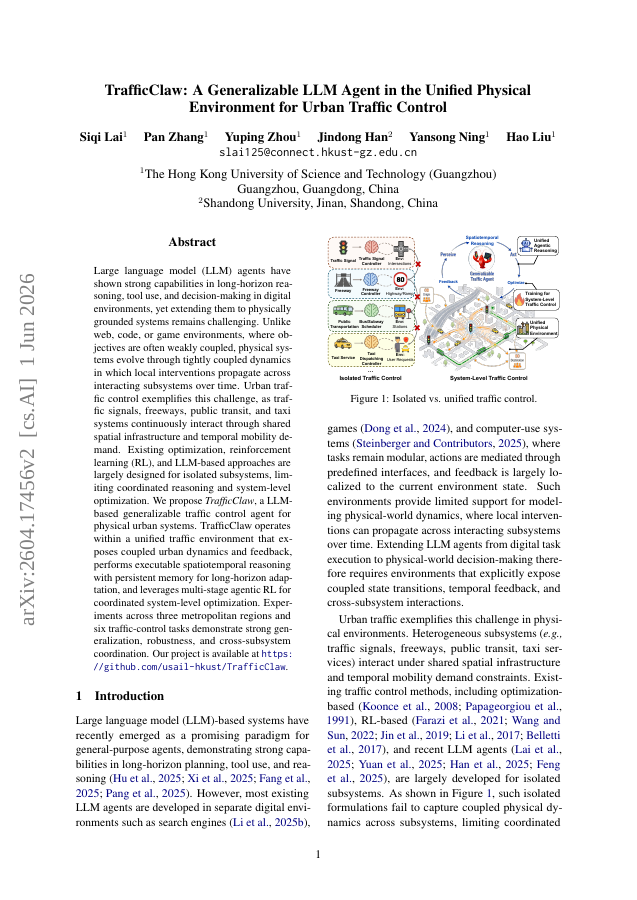
Large language model (LLM) agents have shown strong capabilities in long-horizon reasoning, tool use, and decision-making in digital environments, yet extending them to physically grounded systems remains challenging. Unlike web, code, or game environments, where objectives are often weakly coupled, physical systems evolve through tightly coupled dynamics in which local interventions propagate across interacting subsystems over time. Urban traffic control exemplifies this challenge, as traffic signals, freeways, public transit, and taxi systems continuously interact through shared spatial infrastructure and temporal mobility demand. Existing optimization, reinforcement learning (RL), and LLM-based approaches are largely designed for isolated subsystems, limiting coordinated reasoning and system-level optimization. We propose TrafficClaw, a LLM-based generalizable traffic control agent for physical urban systems. TrafficClaw operates within a unified traffic environment that exposes coupled urban dynamics and feedback, performs executable spatiotemporal reasoning with persistent memory for long-horizon adaptation, and leverages multi-stage agentic RL for coordinated system-level optimization. Experiments across three metropolitan regions and six traffic-control tasks demonstrate strong generalization, robustness, and cross-subsystem coordination. Our project is available at https://github.com/usail-hkust/TrafficClaw.
TrafficClaw: A Generalizable LLM Agent in the Unified Physical Environment for Urban Traffic Control
Large language model (LLM) agents have shown strong capabilities in long-horizon reasoning, tool use, and decision-making in digital environments, yet extending them to physically grounded systems remains challenging.
- Preview
- Year
- 2026
- Hosting
- Abstract onlyARXIV-DEFAULT
Cite
Notes
Only stored in your browser.
Attribution
- Abstract & full text
- arxiv.org/abs/2604.17456ARXIV-DEFAULT
- TL;DR
- Semantic Scholar