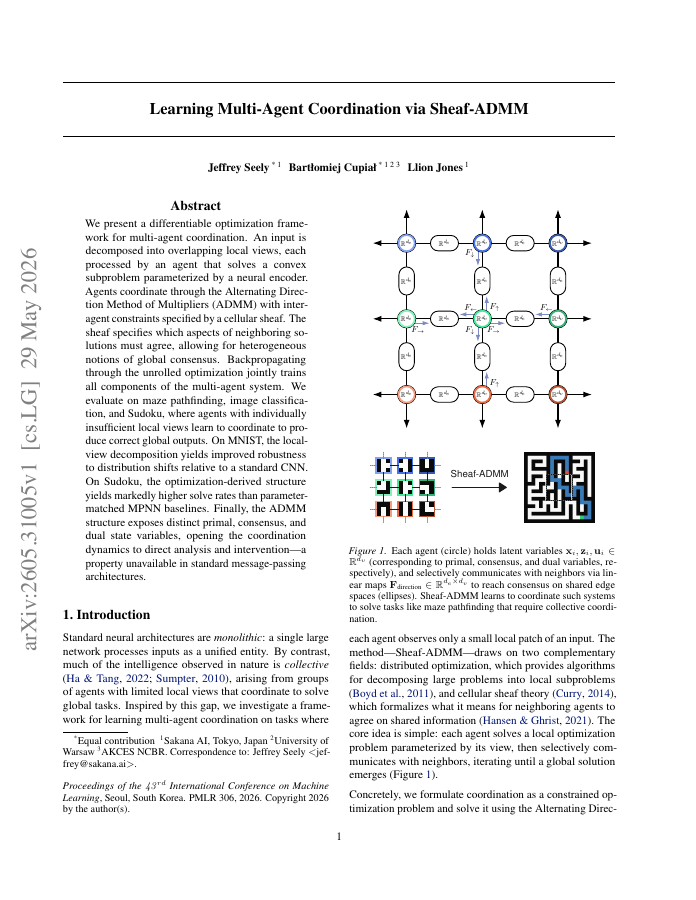
We present a differentiable optimization framework for multi-agent coordination. An input is decomposed into overlapping local views, each processed by an agent that solves a convex subproblem parameterized by a neural encoder. Agents coordinate through the Alternating Direction Method of Multipliers (ADMM) with inter-agent constraints specified by a cellular sheaf. The sheaf specifies which aspects of neighboring solutions must agree, allowing for heterogeneous notions of global consensus. Backpropagating through the unrolled optimization jointly trains all components of the multi-agent system. We evaluate on maze pathfinding, image classification, and Sudoku, where agents with individually insufficient local views learn to coordinate to produce correct global outputs. On MNIST, the local-view decomposition yields improved robustness to distribution shifts relative to a standard CNN. On Sudoku, the optimization-derived structure yields markedly higher solve rates than parameter-matched MPNN baselines. Finally, the ADMM structure exposes distinct primal, consensus, and dual state variables, opening the coordination dynamics to direct analysis and intervention -- a property unavailable in standard message-passing architectures.
Learning Multi-Agent Coordination via Sheaf-ADMM
We present a differentiable optimization framework for multi-agent coordination. An input is decomposed into overlapping local views, each processed by an agent that solves a convex subproblem parameterized by a neural encoder.
- Preview
- Year
- 2026
- Hosting
- Full text hostedCC-BY-4.0
Cite
Notes
Only stored in your browser.
Attribution
- Abstract & full text
- arxiv.org/abs/2605.31005CC-BY-4.0
- TL;DR
- Semantic Scholar