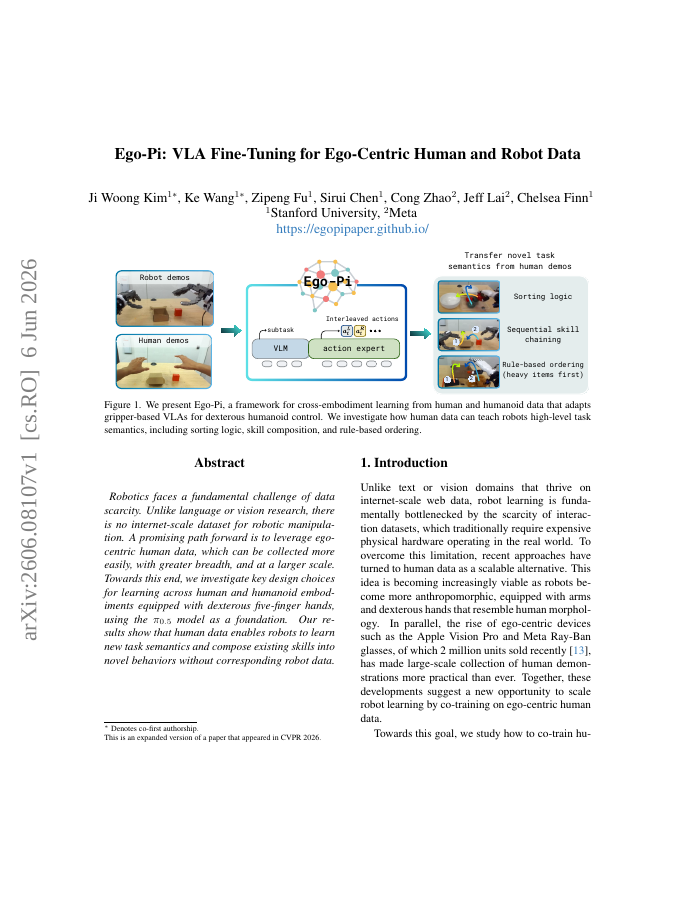
Robotics faces a fundamental challenge of data scarcity. Unlike language or vision research, there is no internet-scale dataset for robotic manipulation. A promising path forward is to leverage egocentric human data, which can be collected more easily, with greater breadth, and at a larger scale. Towards this end, we investigate key design choices for learning across human and humanoid embodiments equipped with dexterous five-finger hands, using the π_{0.5} model as a foundation. Our results show that human data enables robots to learn new task semantics and compose existing skills into novel behaviors without corresponding robot data. The paper website is here: https://egopipaper.github.io/
Ego-Pi: VLA Fine-Tuning for Ego-Centric Human and Robot Data
Robotics faces a fundamental challenge of data scarcity. Unlike language or vision research, there is no internet-scale dataset for robotic manipulation. A promising path forward is to leverage egocentric human data, which can be collected more easily, with greater breadth, and…
- Preview
- Year
- 2026
- Hosting
- Excerpt onlyCC-BY-NC-4.0
Cite
Notes
Only stored in your browser.
Attribution
- Abstract & full text
- arxiv.org/abs/2606.08107CC-BY-NC-4.0
- TL;DR
- Semantic Scholar