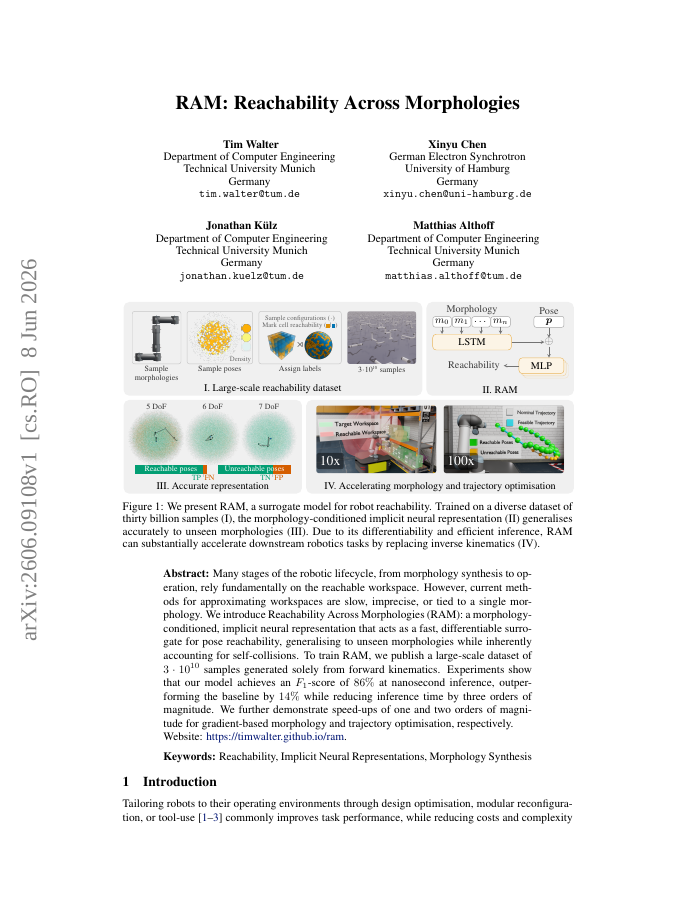
Many stages of the robotic lifecycle, from morphology synthesis to operation, rely fundamentally on the reachable workspace. However, current methods for approximating workspaces are slow, imprecise, or tied to a single morphology. We introduce Reachability Across Morphologies (RAM): a morphology-conditioned, implicit neural representation that acts as a fast, differentiable surrogate for pose reachability, generalising to unseen morphologies while inherently accounting for self-collisions. To train RAM, we publish a large-scale dataset of 3\cdot10^{10} samples generated solely from forward kinematics. Experiments show that our model achieves an F_1-score of 86% at nanosecond inference, outperforming the baseline by 14% while reducing inference time by three orders of magnitude. We further demonstrate speed-ups of one and two orders of magnitude for gradient-based morphology and trajectory optimisation, respectively. Website: https://timwalter.github.io/ram.
RAM: Reachability Across Morphologies
Many stages of the robotic lifecycle, from morphology synthesis to operation, rely fundamentally on the reachable workspace. However, current methods for approximating workspaces are slow, imprecise, or tied to a single morphology.
- Preview
- Year
- 2026
- Hosting
- Full text hostedCC-BY-4.0
Cite
Notes
Only stored in your browser.
Attribution
- Abstract & full text
- arxiv.org/abs/2606.09108CC-BY-4.0
- TL;DR
- Semantic Scholar