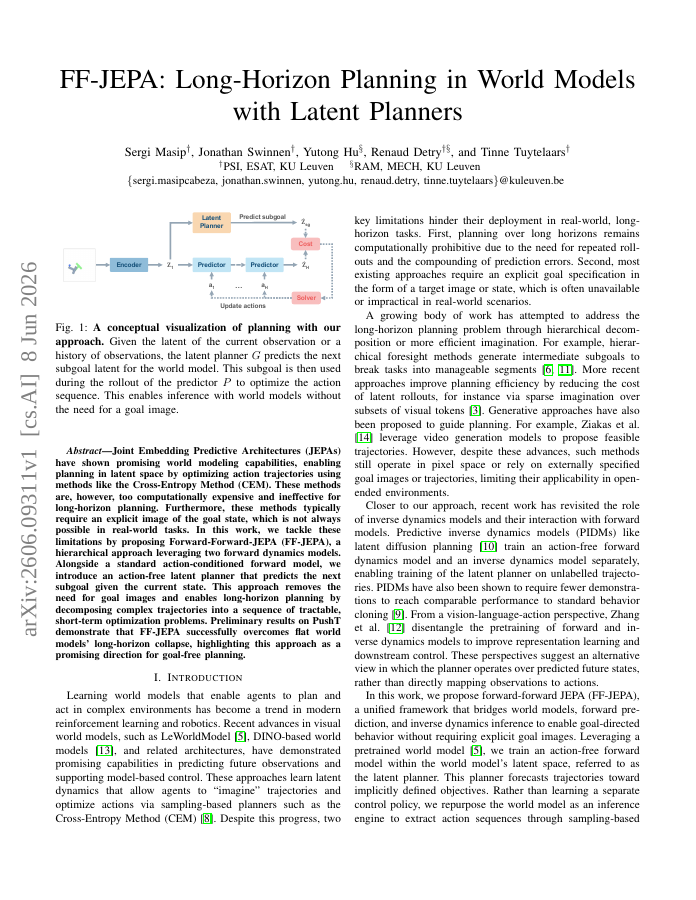
Joint Embedding Predictive Architectures (JEPAs) have shown promising world modeling capabilities, enabling planning in latent space by optimizing action trajectories using methods like the Cross-Entropy Method (CEM). These methods are, however, too computationally expensive and ineffective for long-horizon planning. Furthermore, these methods typically require an explicit image of the goal state, which is not always possible in real-world tasks. In this work, we tackle these limitations by proposing Forward-Forward-JEPA (FF-JEPA), a hierarchical approach leveraging two forward dynamics models. Alongside a standard action-conditioned forward model, we introduce an action-free latent planner that predicts the next subgoal given the current state. This approach removes the need for goal images and enables long-horizon planning by decomposing complex trajectories into a sequence of tractable, short-term optimization problems. Preliminary results on PushT demonstrate that FF-JEPA successfully overcomes flat world models' long-horizon collapse, highlighting this approach as a promising direction for goal-free planning.
FF-JEPA: Long-Horizon Planning in World Models with Latent Planners
Joint Embedding Predictive Architectures (JEPAs) have shown promising world modeling capabilities, enabling planning in latent space by optimizing action trajectories using methods like the Cross-Entropy Method (CEM).
- Preview
- Year
- 2026
- Hosting
- Full text hostedCC-BY-4.0
Cite
Notes
Only stored in your browser.
Attribution
- Abstract & full text
- arxiv.org/abs/2606.09311CC-BY-4.0
- TL;DR
- Semantic Scholar