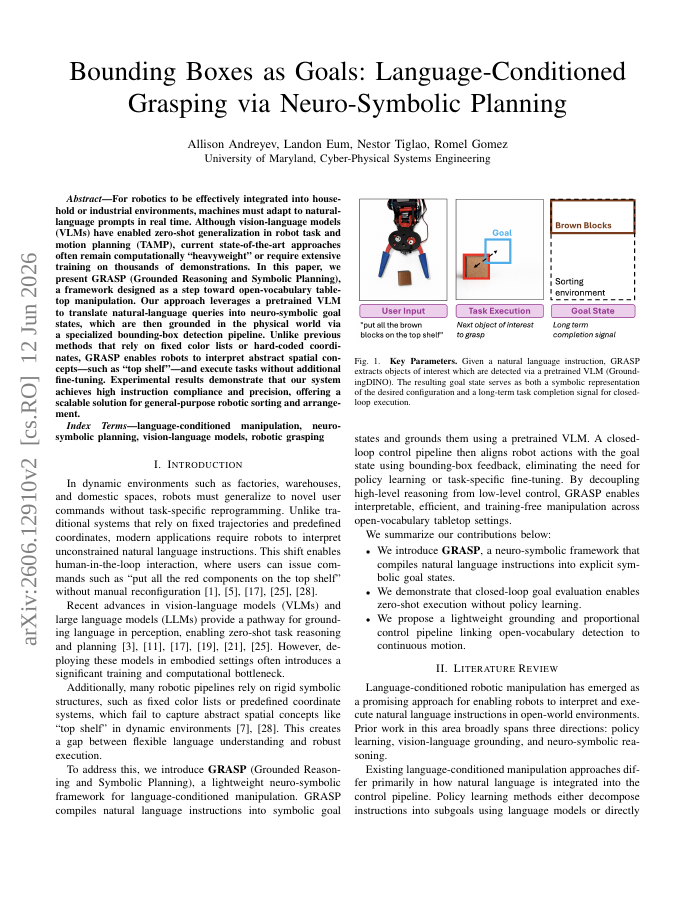
For robotics to be effectively integrated into household or industrial environments, machines must adapt to natural-language prompts in real time. Although Vision-Language Models (VLMs) have enabled zero-shot generalization in robot task and motion planning (TAMP), current state-of-the-art approaches often remain computationally "heavyweight" or require extensive training on thousands of demonstrations. We present GRASP (Grounded Reasoning and Symbolic Planning), a framework designed as a step toward open-vocabulary tabletop manipulation. Our approach leverages a pretrained VLM to translate natural-language queries into neuro-symbolic goal states, grounded in the physical world via a bounding-box detection pipeline. Unlike methods that rely on fixed color lists or hard-coded coordinates, GRASP enables robots to interpret abstract spatial concepts such as "top shelf" and execute tasks without additional fine-tuning. We achieve 73.3% overall success across 90 real-robot trials at three difficulty levels, requiring no task-specific training.
Bounding Boxes as Goals: Language-Conditioned Grasping via Neuro-Symbolic Planning
For robotics to be effectively integrated into household or industrial environments, machines must adapt to natural-language prompts in real time. Although Vision-Language Models (VLMs) have enabled zero-shot generalization in robot task and motion planning (TAMP), current…
- Preview
- Year
- 2026
- Hosting
- Full text hostedCC-BY-4.0
Cite
Notes
Only stored in your browser.
Attribution
- Abstract & full text
- arxiv.org/abs/2606.12910CC-BY-4.0
- TL;DR
- Semantic Scholar