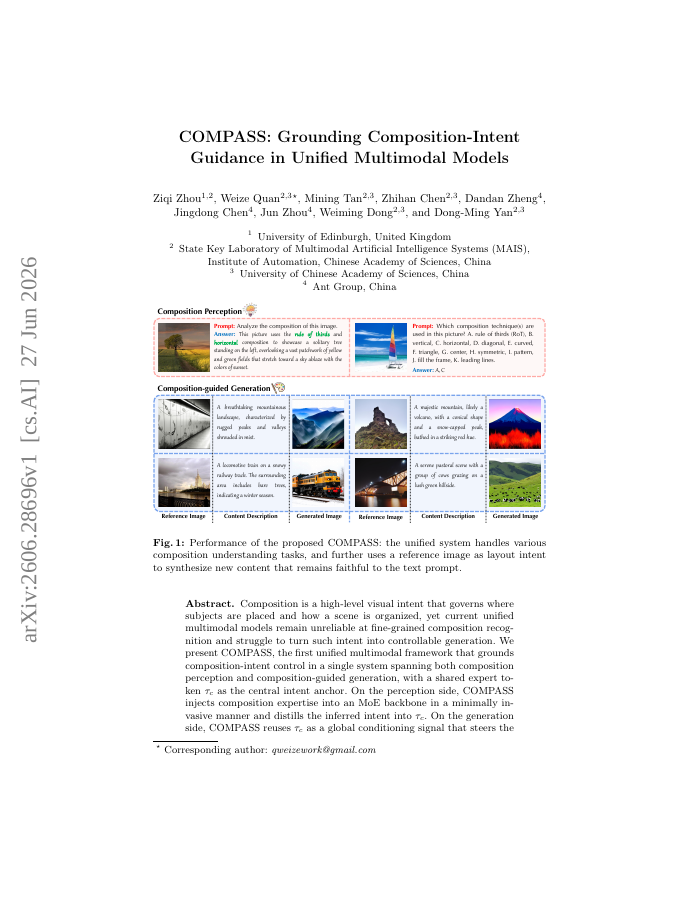
Composition is a high-level visual intent that governs where subjects are placed and how a scene is organized, yet current unified multimodal models remain unreliable at fine-grained composition recognition and struggle to turn such intent into controllable generation. We present COMPASS, the first unified multimodal framework that grounds composition-intent control in a single system spanning both composition perception and composition-guided generation, with a shared expert token τ_c as the central intent anchor. On the perception side, COMPASS injects composition expertise into an MoE backbone in a minimally invasive manner and distills the inferred intent into τ_c. On the generation side, COMPASS reuses τ_c as a global conditioning signal that steers the denoising trajectory, effectively converting passive composition analysis into explicit layout control. To support systematic instruction-following composition learning and evaluation at scale, we construct Comp-11, a large-scale dataset with an 11-class taxonomy and reasoning-augmented annotations. Extensive experiments show that COMPASS substantially improves category-level composition understanding and delivers more composition-consistent, prompt-faithful generation than strong baselines.
COMPASS: Grounding Composition-Intent Guidance in Unified Multimodal Models
Composition is a high-level visual intent that governs where subjects are placed and how a scene is organized, yet current unified multimodal models remain unreliable at fine-grained composition recognition and struggle to turn such intent into controllable generation.
- Preview
- Year
- 2026
- Hosting
- Abstract onlyARXIV-DEFAULT
Cite
Notes
Only stored in your browser.
Attribution
- Abstract & full text
- arxiv.org/abs/2606.28696ARXIV-DEFAULT
- TL;DR
- Semantic Scholar