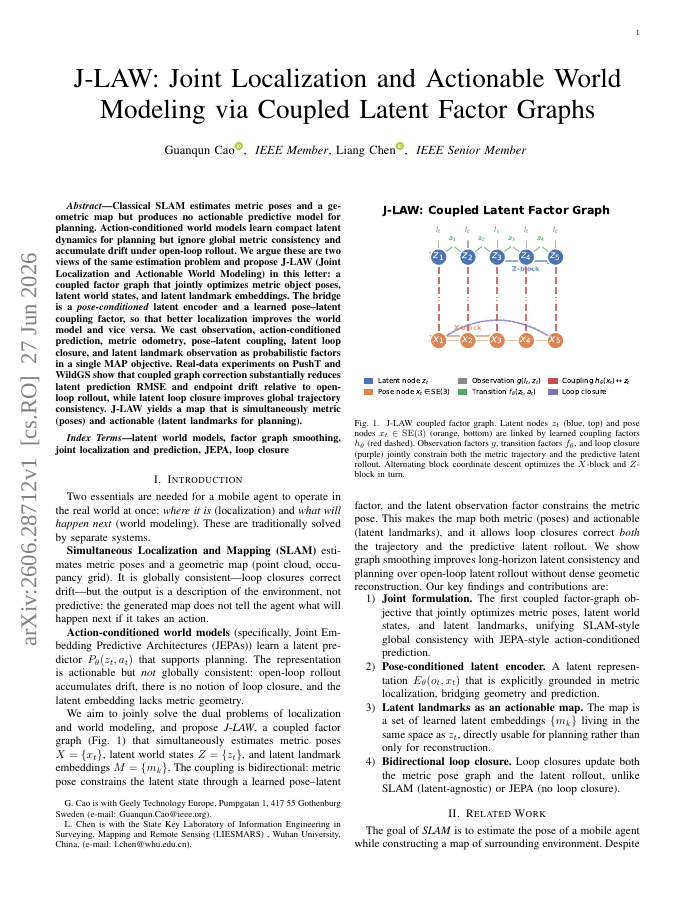
Classical SLAM estimates metric poses and a geometric map but produces no actionable predictive model for planning. Action-conditioned world models learn compact latent dynamics for planning but ignore global metric consistency and accumulate drift under open-loop rollout. We argue these are two views of the same estimation problem and propose J-LAW (Joint Localization and Actionable World Modeling) in this letter: a coupled factor graph that jointly optimizes metric object poses, latent world states, and latent landmark embeddings. The bridge is a pose-conditioned latent encoder and a learned pose--latent coupling factor, so that better localization improves the world model and vice versa. We cast observation, action-conditioned prediction, metric odometry, pose--latent coupling, latent loop closure, and latent landmark observation as probabilistic factors in a single MAP objective. Real-data experiments on PushT and WildGS show that coupled graph correction substantially reduces latent prediction RMSE and endpoint drift relative to open-loop rollout, while latent loop closure improves global trajectory consistency. J-LAW yields a map that is simultaneously metric (poses) and actionable (latent landmarks for planning).
J-LAW: Joint Localization and Actionable World Modeling via Coupled Latent Factor Graphs
Classical SLAM estimates metric poses and a geometric map but produces no actionable predictive model for planning. Action-conditioned world models learn compact latent dynamics for planning but ignore global metric consistency and accumulate drift under open-loop rollout.
- Preview
- Year
- 2026
- Hosting
- Excerpt onlyCC-BY-NC-SA-4.0
Cite
Notes
Only stored in your browser.
Attribution
- Abstract & full text
- arxiv.org/abs/2606.28712CC-BY-NC-SA-4.0
- TL;DR
- Semantic Scholar