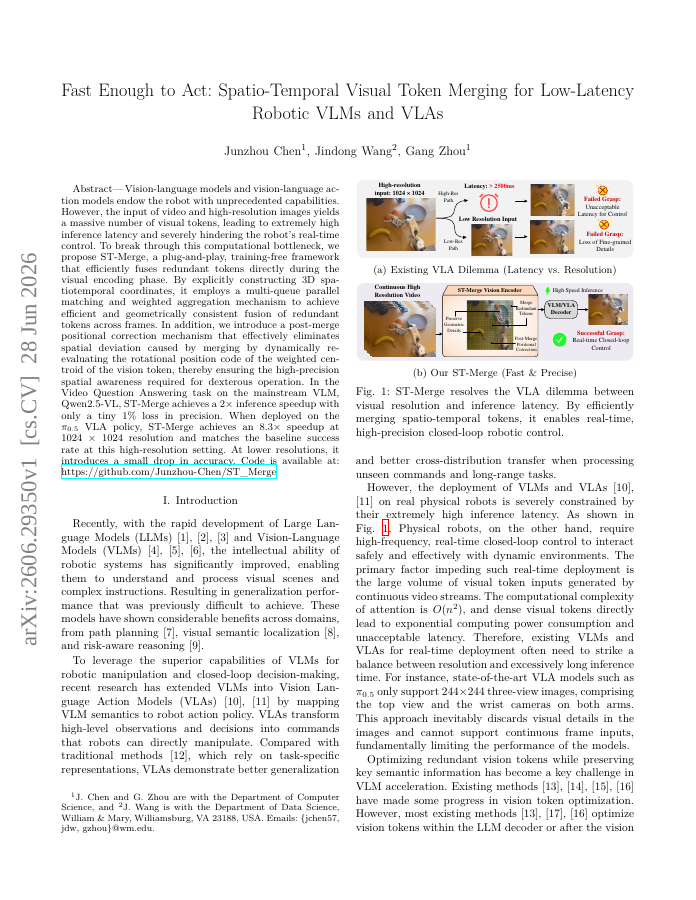
Vision-language models and vision-language action models endow the robot with unprecedented capabilities. However, the input of video and high-resolution images yields a massive number of visual tokens, leading to extremely high inference latency and severely hindering the robot's real-time control. To break through this computational bottleneck, we propose ST-Merge, a plug-and-play, training-free framework that efficiently fuses redundant tokens directly during the visual encoding phase. By explicitly constructing 3D spatiotemporal coordinates, it employs a multi-queue parallel matching and weighted aggregation mechanism to achieve efficient and geometrically consistent fusion of redundant tokens across frames. In addition, we introduce a post-merge positional correction mechanism that effectively eliminates spatial deviation caused by merging by dynamically re-evaluating the rotational position code of the weighted centroid of the vision token, thereby ensuring the high-precision spatial awareness required for dexterous operation. In the Video Question Answering task on the mainstream VLM, Qwen2.5-VL, ST-Merge achieves a 2\times inference speedup with only a tiny 1% loss in precision. When deployed on the π_{0.5} VLA policy, ST-Merge achieves an 8.3\times speedup at 1024 \times 1024 resolution and matches the baseline success rate at this high-resolution setting. At lower resolutions, it introduces a small drop in accuracy.
Fast Enough to Act: Spatio-Temporal Visual Token Merging for Low-Latency Robotic VLMs and VLAs
Vision-language models and vision-language action models endow the robot with unprecedented capabilities. However, the input of video and high-resolution images yields a massive number of visual tokens, leading to extremely high inference latency and severely hindering the…
- Preview
- Year
- 2026
- Hosting
- Excerpt onlyCC-BY-NC-4.0
Cite
Notes
Only stored in your browser.
Attribution
- Abstract & full text
- arxiv.org/abs/2606.29350CC-BY-NC-4.0
- TL;DR
- Semantic Scholar