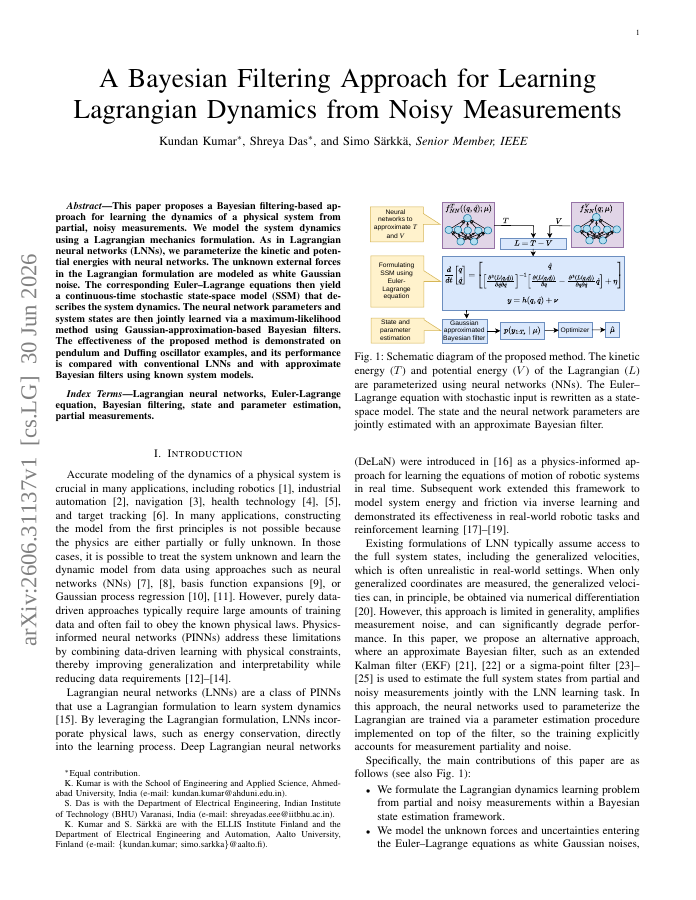
This paper proposes a Bayesian filtering-based approach for learning the dynamics of a physical system from partial, noisy measurements. We model the system dynamics using a Lagrangian mechanics formulation. As in Lagrangian neural networks (LNNs), we parameterize the kinetic and potential energies with neural networks. The unknown external forces in the Lagrangian formulation are modeled as white Gaussian noise. The corresponding Euler--Lagrange equations then yield a continuous-time stochastic state-space model (SSM) that describes the system dynamics. The neural network parameters and system states are then jointly learned via a maximum-likelihood method using Gaussian-approximation-based Bayesian filters. The effectiveness of the proposed method is demonstrated on pendulum and Duffing oscillator examples, and its performance is compared with conventional LNNs and with approximate Bayesian filters using known system models.
A Bayesian Filtering Approach for Learning Lagrangian Dynamics from Noisy Measurements
This paper proposes a Bayesian filtering-based approach for learning the dynamics of a physical system from partial, noisy measurements. We model the system dynamics using a Lagrangian mechanics formulation.
- Preview
- Year
- 2026
- Hosting
- Abstract onlyARXIV-DEFAULT
Cite
Notes
Only stored in your browser.
Attribution
- Abstract & full text
- arxiv.org/abs/2606.31137ARXIV-DEFAULT
- TL;DR
- Semantic Scholar