Semantic segmentation models struggle with data sparsity and rare or visually diverse regions, e.g., dense regions or small objects in aerial or autonomous mobility data. While synthetic augmentation is an appealing solution, directly generating new labeled data risks misalignment of labels and generated pixels. Existing solutions to this problem often rely on external models, or employ coarse heuristics such as indiscriminately augmenting all foreground objects or entire backgrounds, which wastes capacity on uninformative pixels. To address this, we propose an uncertainty-guided synthetic context augmentation strategy that strictly preserves label validity and efficiently maximizes pixel informativeness per synthetic sample - no external guardrails required. Using a baseline segmenter's predictive entropy, we identify uncertain semantic regions and inpaint only the complementary visual context. When fine-tuning the segmenter on this synthetic data, we compute the loss only over the original pixels, excluding inpainted regions. This focuses learning on the unmodified, uncertain regions while presenting them in novel contexts. We demonstrate substantial mIoU gains on Cityscapes, UAVID, and BDD100K with the largest gains on rare and difficult classes such as buses, trains, or (from the aerial perspective) cars. Our results demonstrate that uncertainty-guided context augmentation is a highly effective lever to improve segmentation performance on complex datasets, with code provided at https://github.com/XITASO/Preserve-the-Hard-Regenerate-the-Rest.
Preserve the Hard, Regenerate the Rest: Uncertainty-Guided Synthetic Training Data Augmentation with Diffusion Models
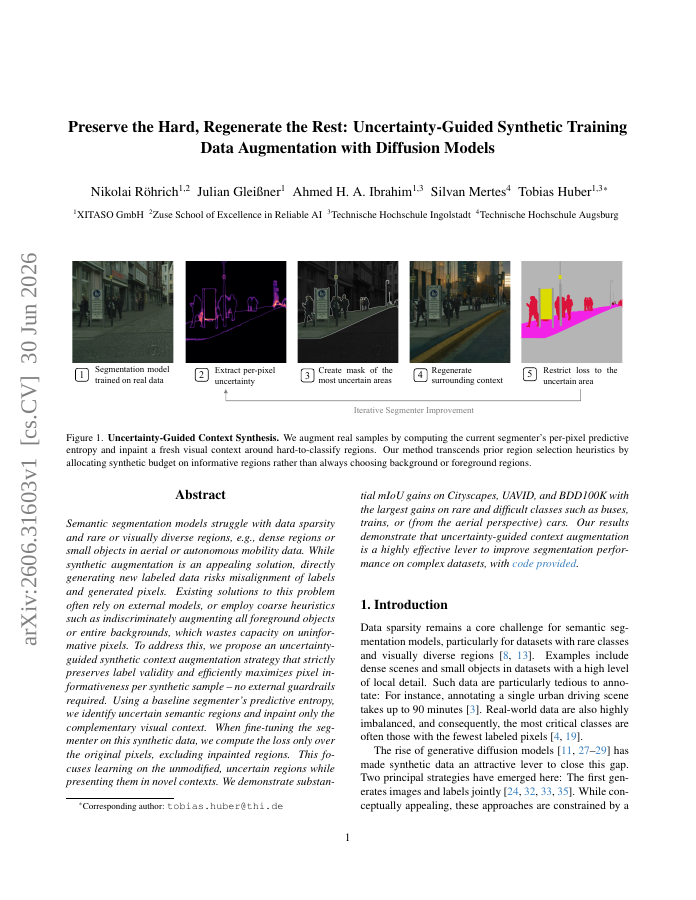
Semantic segmentation models struggle with data sparsity and rare or visually diverse regions, e.g., dense regions or small objects in aerial or autonomous mobility data.
- Preview
- Year
- 2026
- Hosting
- Abstract onlyARXIV-DEFAULT
Cite
Notes
Only stored in your browser.
Attribution
- Abstract & full text
- arxiv.org/abs/2606.31603ARXIV-DEFAULT
- TL;DR
- Semantic Scholar